
杠杆公式初中(杠杆公式初中变形式)
 摘要:
本文小编和大家聊聊“杠杆公式初中”,如果对大家有帮助,请收藏一下吧!本文目录一览:1、初三物理杠杆到机械效率的所有公式2、...
摘要:
本文小编和大家聊聊“杠杆公式初中”,如果对大家有帮助,请收藏一下吧!本文目录一览:1、初三物理杠杆到机械效率的所有公式2、... 本文小编和大家聊聊“杠杆公式初中”,如果对大家有帮助,请收藏一下吧!
本文目录一览:
- 1、初三物理杠杆到机械效率的所有公式
- 2、初三物理《杠杆》的知识点
- 3、初中物理的杠杆
- 4、初中杠杆公式计算
- 5、杠杆原理公式
- 6、初中物理杠杆的知识点
初三物理杠杆到机械效率的所有公式
1、初中物理效率计算公式:我们把有用功和总功的比值叫做机械效率。用符号η表示,计算公式为η=W有/W总×。
2、关于机械效率公式及推导式的介绍 机械效率是指机械在稳定运转时,机械的输出功与输入功的百分比,机械效率公式:η=(W有用/W总)×,机械功率的推导式:η=G/(G+G动),η=f/(nF),η=G物h/(FL)。
3、杠杆的机械效率公式为:力臂比=输出力÷输入力=输入距离÷输出距离。下面将针对这个公式进行详细阐述。什么是杠杆?杠杆是一种简单机械,由一个支点和两个力臂组成。
4、用滑轮组竖直提升重物时,机械效率的导出公式有:(1)η= Gh/ FS,其中G表示物体重力,h表示物体上升的高度,F表示绳自由端的拉力,S表示绳被拉动的距离。
图片来源于网络,如有侵权,请联系删除
5、平均速度V平=S/t(定义式):在你知道路程和时间项要求取速度的时候可以直接使用这个公式。
6、机械功率计算公式为n=W有/W总×。有用功和总功的比值叫做机械效率。用符号表示。主要内容包括滑轮组,斜面效率,杠杆转动,常见效率,增大效率。机械效率的意义。
初三物理《杠杆》的知识点
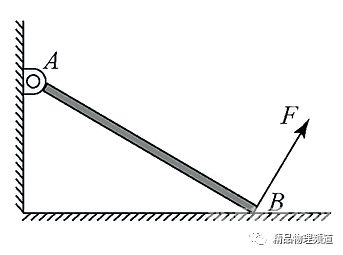
⑶解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动力臂,要使动力臂需要做到①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。
(1)杠杆:在力的作用下能绕着固定点转动的硬棒就是杠杆。
杠杆:能绕某一固定点转动的硬棒叫杠杆。支点(O):杠杆绕着转动的点。
物理杠杆原理知识点如下:(1)在无重量的杆的两端离支点相等的距离处挂上相等的重量,它们将平衡。(2)在无重量的杆的两端离支点相等的距离处挂上不相等的重量,重的一端将下倾。
物理杠杆知识点总结 定义:在力的作用下绕着固定点转动的硬棒叫杠杆。说明:①杠杆可直可曲,形状任意。②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。
公基考试涉及到的物理常识内容庞杂,覆盖面广泛,本文就常见的杠杆原理这个知识点进行梳理。杠 杆 定义:在力的作用下能绕着固定点转动的硬棒。杠杆可以是任意形状的硬棒。
初中物理的杠杆
1、②动力:使杠杆转动的力。用字母F1表示。③阻力:阻碍杠杆转动的力。用字母F2表示。(说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反。
2、初中物理知识点总结杠杆的介绍 (1)杠杆:在力的作用下能绕着固定点转动的硬棒就是杠杆。
3、定义:在力的作用下绕着固定点转动的硬棒叫杠杆。说明:①杠杆可直可曲,形状任意。②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。五要素——组成杠杆示意图。①支点:杠杆绕着转动的点。
4、初中物理杠杆知识点汇总:杠杆:能绕某一固定点转动的硬棒叫杠杆。支点(O):杠杆绕着转动的点。
5、杠杆是一种简单机械。在力的作用下能绕着固定点转动的硬棒就是杠杆。在生活中根据需要,杠杆可以做成直的,也可以做成弯的,但必须是硬的物体。跷跷板、剪刀、扳子、撬棒、钓鱼竿等,都是杠杆。
初中杠杆公式计算
1、杠杆原理公式:动力×动力臂=阻力×阻力臂,即:F1×L1=F2×L2。式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂,杠杆原理也叫做“杠杆平衡条件”。
2、总的来说,杠杆的计算公式是F1L1=F2L2,它描述了杠杆平衡时动力和阻力之间的关系。通过调整物体的位置或添加额外的力,我们可以使杠杆达到平衡状态。
3、杠杆原理公式:动力×动力臂=阻力×阻力臂,用代数式表示为F1·L1=F2·L2,式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂。从上式可看出,要使杠杆达到平衡,动力臂是阻力臂的几倍,阻力就是动力的几倍。
杠杆原理公式
杠杆原理公式:动力×动力臂=阻力×阻力臂,用代数式表示为F1·L1=F2·L2,式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂。从上式可看出,要使杠杆达到平衡,动力臂是阻力臂的几倍,阻力就是动力的几倍。
杠杆原理公式为:动力×动力臂=阻力×阻力臂,即:F1×L1=F2×L2。式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂,杠杆原理也叫做“杠杆平衡条件”。
杠杆原理的公式是:杠杆原理 = 力臂1/力臂2其中,力臂1代表施加力的杠杆臂长,力臂2代表作用力的杠杆臂长。杠杆原理是指当力臂1和力臂2不相等时,在杠杆运动中,做功的比例与力臂的比例相等。
杠杆原理公式:动力×动力臂=阻力×阻力臂,用代数式表示为F1·L1=F2·L2。式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂。
在物理学中,杠杠的计算公式分为两个学段:初中阶段和高中阶段。初中阶段:杠杠的计算公式为:动力x动力臂=阻力x阻力臂。这是理想杠杆。上述等式又称为杠杆的平衡条件 :即F1×L1=F2×L2。
对于理想杠杆案例,输入杠杆的功率等于杠杆输出的功率。
初中物理杠杆的知识点
杠杆:能绕某一固定点转动的硬棒叫杠杆。支点(O):杠杆绕着转动的点。
定义:在力的作用下绕着固定点转动的硬棒叫杠杆。说明:①杠杆可直可曲,形状任意。②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。五要素——组成杠杆示意图。①支点:杠杆绕着转动的点。
②动力:使杠杆转动的力。用字母F1表示。③阻力:阻碍杠杆转动的力。用字母F2表示。(说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反。
动力臂:从支点到动力作用线的距离,通常用L1表示。阻力臂:从支点到阻力作用线的距离,通常用L2表示。(注意:杠杆的支点不一定要在中间,满足下列三个点的系统,基本上就是杠杆:支点、施力点、受力点)。
初三物理杠杆知识点归纳 杠杆 (1)定义:一根硬棒在力的作用下能绕着固定点转动,这根硬棒叫杠杆。
关于杠杆公式初中和杠杆公式初中变形式的介绍到此就结束了,不知道你从中找到你需要的信息了吗 ?如果你还想了解更多这方面的信息,记得收藏关注本站。